ISD Office, The Hong Kong University of Science and Technology, Clear Water Bay, Kowloon, Hong Kong
Facade Installation Robotic System (F.I.R.S)
Introduction
We strive to leverage the plentiful vertical spaces of Hong Kong building façades to generate sustainable energy using Building-Integrated Photovoltaics (BIPV). However, a major pain point for construction and property companies adopting this technology is the lack of standard installation procedures, which leads to high labour costs and occupational risks due to high manual intervention at heights.
To solve this problem, we designed a smart construction robot that can handle the most high-risk and fatigue-inducing procedures of mounting the panels at heights, while giving workers full control to monitor and intervene safely from the ground. Using Computer Vision, Robot Operating System (ROS), and UI/UX techniques, we aim to provide seamless IoT connectivity and an intuitive user experience to empower construction workers to install BIPV safely and effectively.
With this solution, we hope to be the first mover and establish an industry standard, such that BIPV can become a mainstay and push forward a greener Hong Kong.
A simulated wall was set up and tested throughout the installation cycle. Our test verifies the feasibility of adopting the dry hanging method for a robot-friendly BIPV installation.
Reaction wall in HKUST Civil Lab
Overall System
Development
Hook Design
As the current installation hooking system for BIPV is not robot-friendly, we have designed and tested a unique hooking design, adopting a dry-hanging mode for the robot.
Wall hook finite element analysis
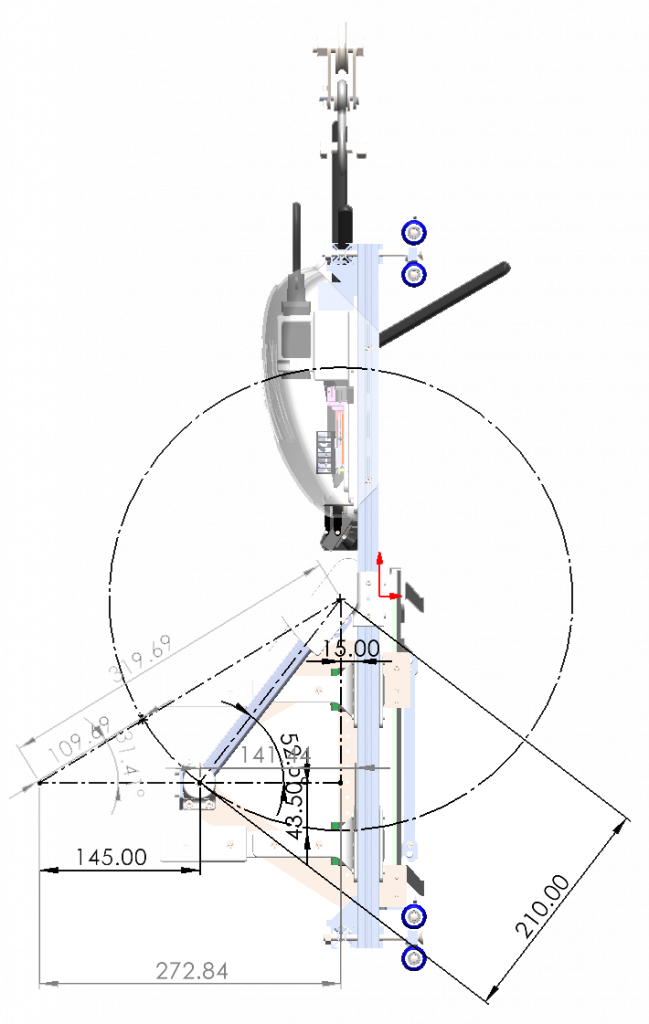
Linkage Design
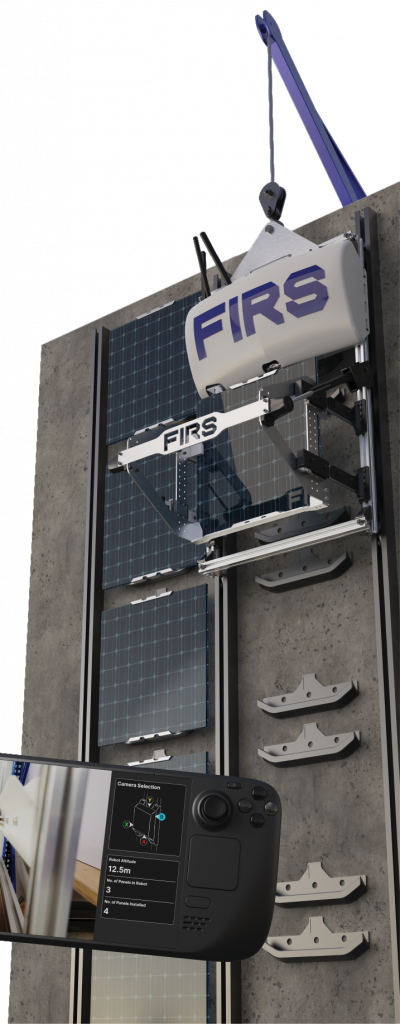
Fixation Module
This is our self-designed fixation module. With two cameras on the top, workers can see the video feed in real-time and adjust the height of the loading bay manually. The center camera can also detect QR codes to read the altitude and other features of the PV panel to be installed.
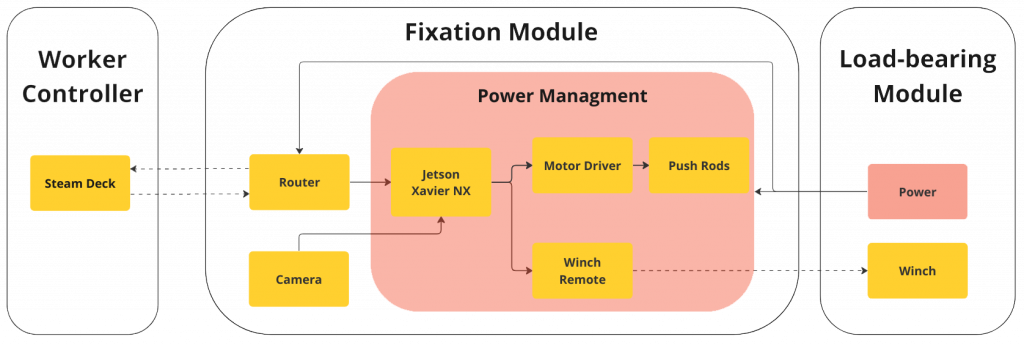
Hardware Connectivity
Our electronic system consists of three parts: a worker controller, a fixation module, and a load-bearing module. Dotted lines denote wireless communication, and solid lines denote wired connection.
The worker controller is the user interface that talks to our user, who is doing construction work. The worker has full control of the robot’s push/pull and ascend/descend and can manually intervene at any time during automatic installation.
The fixation module drives push/pull, ascend/descend, localizes itself, and provides real-time video feedback to the worker controller.
The load-bearing module provides power and lifting to the fixation module.
Hardware Diagram
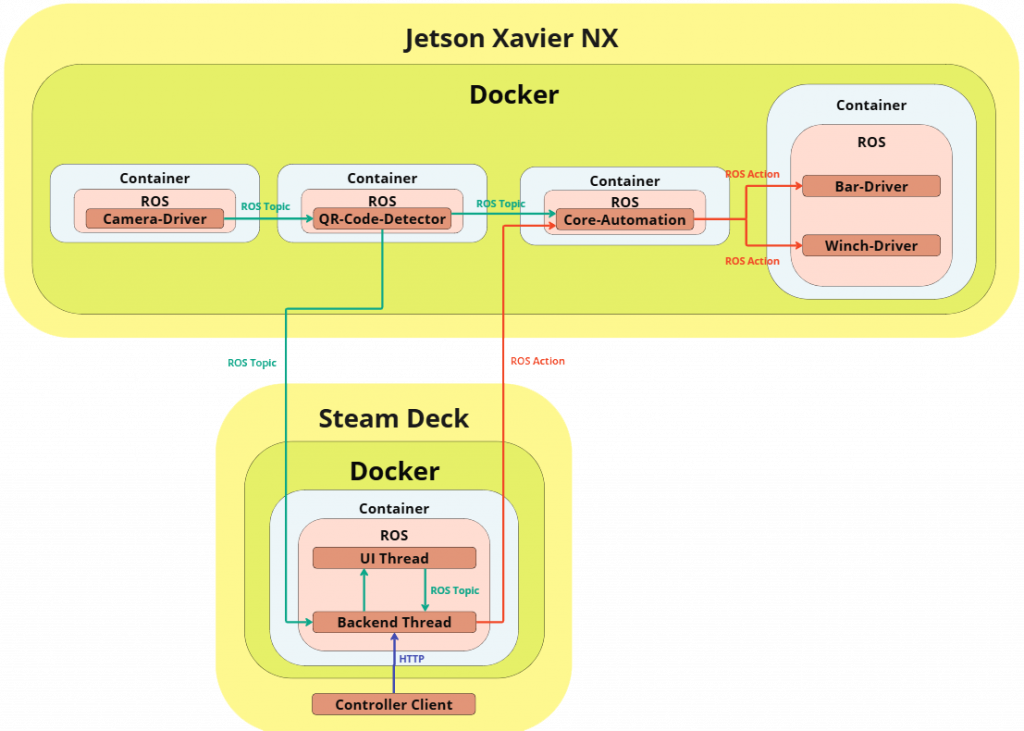
Software Diagram
ROS rqt graph
Software Architecture
Our software system is developed based on ROS 1 Noetic inside Docker containers for better environment isolation and code portability.
When the system is running, both hardware components are connected to the same WiFi/LAN; Jetson Xavier NX acts as the ROS master, and Steam Deck acts as the slave.
The user interface on Steam Deck is developed with PyQt5, and the QR code detector on Jetson Xavier NX is developed with ZBar.